

1
2
3

Human Motion Technologies
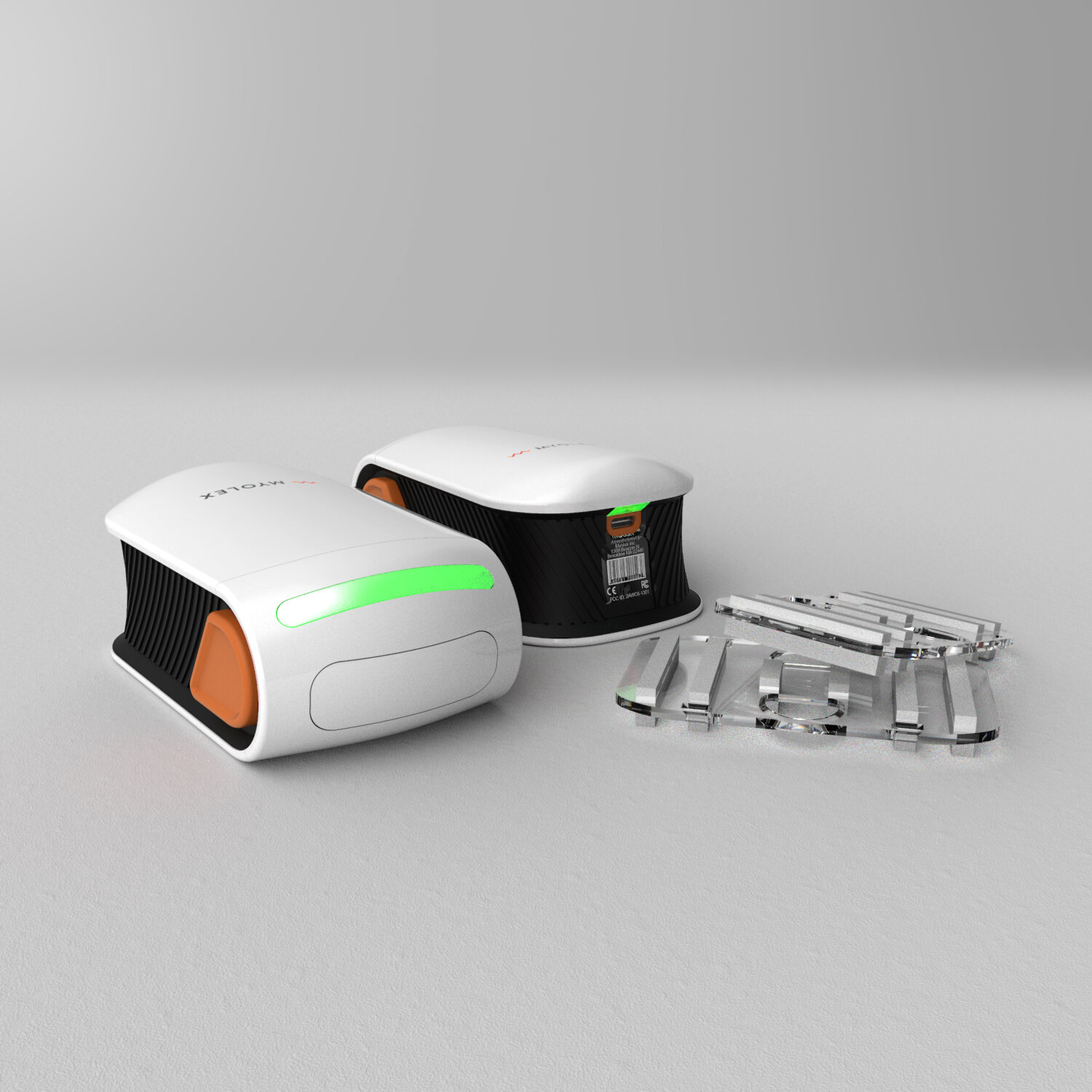
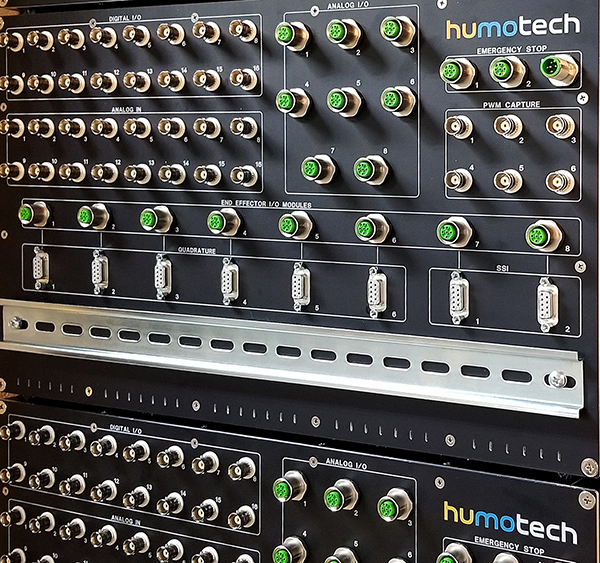
HuMoTech is a spin-out company based on research from the CMU Biomechatronics Laboratory focusing on enhanced ankle-foot prosthesis and data collection. As a recent startup, I was able to help accelerate their development cycle by focusing on the necessary supporting units, such as the development of the Caplex Control System Unit to house all of their unique computing needs and present the necessary connectors in a layout which easy to read and access as well as sourcing or designing all necessary components for the unit.
ProtoInnovations
This group develops robotic platforms designed for extra planetary roving. I assisted with the upkeep and reconfiguration of these platforms through various testing scenarios, during which I also developed a design for a robotic anchoring mechanism intended for use on Mars to enable the scaling and surveying of steep terrain.
National Robotics Engineering Center
The APD vehicle was built as a successor to the Crusher robot, also built at NREC. This Vehicle is designed to run over any terrain and is driven by a teleoperations team. For this project, I was responsible for developing a variety of smaller systems and tests for the internal cooling system as well as supporting the testing team on location during desert demonstrations.